
 |
Overview of improvements to labeling
For information about the improvements to labeling, including details of how this affects the way you work with Vicon Nexus, see:
New subject setup workflow
With the new labeling feature of Vicon Nexus 2, you can greatly reduce the time spent manually labeling complex trials.
In Vicon Nexus 2, subjects can be calibrated using a dynamic (ROM) trial, instead of a static trial. This new type of calibration gives more reliable labeling and more accurate results, and forms part of the new recommended workflow for Nexus.
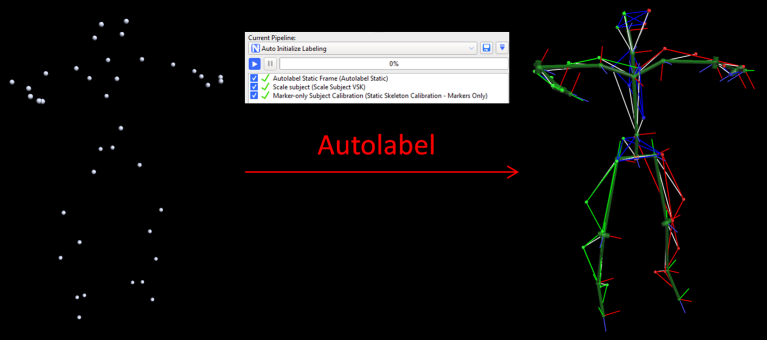
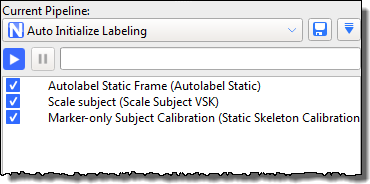
An autolabeling feature, which works with dynamic calibration and is also part of the new recommended workflow, enables you to avoid time-consuming and error-prone manual labeling of the static pose. It is available via a new Auto Initialize Labeling pipeline.
For instructions on the new workflow and how to use the new pipeline, see New workflow for Vicon Nexus 2.
Important: You can still calibrate from a static trial, in the same way as you did in Nexus 1.x, by capturing and reconstructing a static trial, manually labeling it, etc. However, if you do this, you will not benefit from the new, more accurate labeler, and you will be unable to use automated labeling.
For information on how to use the old calibration workflow in Vicon Nexus 2, see Use the old Vicon Nexus calibration workflow.
More effective labeling
Nexus 2 uses the labeling skeleton (VSK) to label trajectories more effectively and with far fewer mis-labelings. This is done by combining two approaches:
❙ When booting, Nexus attempts to work out the labeling for the active subjects with marker statistics calculated from the VSK. This is done without requiring any information from earlier frames, such as previous labels.
❙ When tracking, Nexus uses the pose of the labeling skeleton from the previous frame’s labels. This is used to predict the labeling in the current frame.
Both booting and tracking are carried out in parallel and the results are merged to get the best solution. The two methods are complementary. Booting is required to start the tracking. Tracking is efficient and can be robust to marker occlusion. By continually checking the tracking with the booting Nexus is able to correct any tracking mistakes.
To further improve the labeler’s ability to prevent mislabeling, it can also make use of joint ranges on the labeling skeleton. If you enable joint range parameters, segments whose joints are out of range are not labeled and no distal segments from an out-of-range segment are labeled.
To get the full benefit of the new labeling feature, you must use the new subject setup workflow and a labeling skeleton template that is designed for the new labeler (not Plug-in Gait templates designed for use with Nexus 1.x). For more information, see New workflow for Vicon Nexus 2.